
Asparagus Harvesting Robot
I spent a year working as a Research Assistant with the Australian Centre for Robotic Vision at the Australian National University. During this time my main project involved the development of a prototype robotic harvester for green asparagus. My role involved developing a vision system that would enable the robotic to detect and localise asparagus spears that were ready for harvest.
Marketing Material
Flyer.
Technical Summary.
Project Overview
Our goal was to develop a tractor-mountable green asparagus harvesting robot that operated at comparable speeds to human labour.
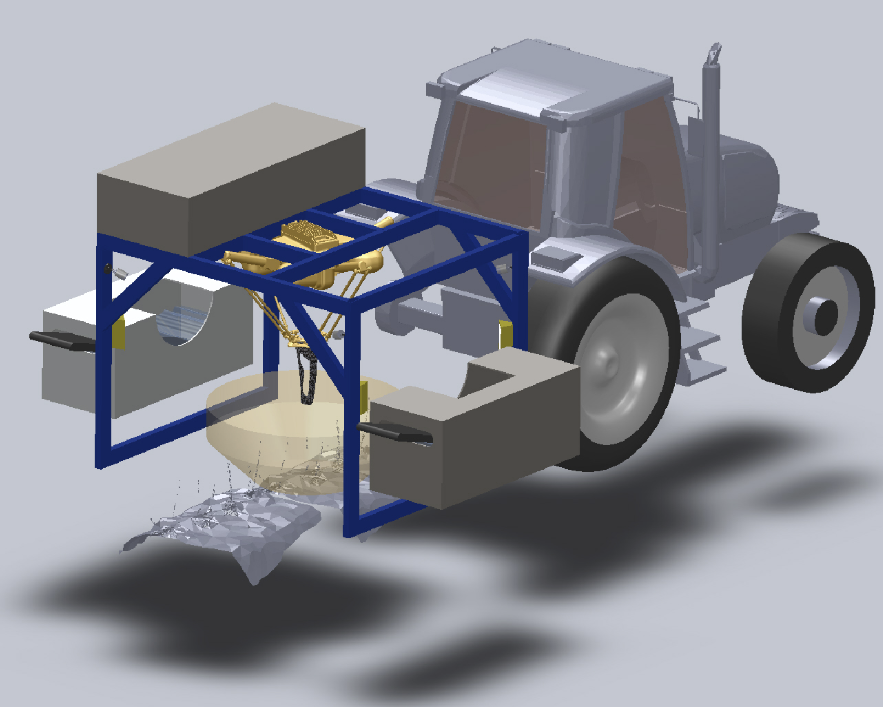 Prototype Robotic Harvester. Courtesy of Alex Martin, ANU.
Prototype Robotic Harvester. Courtesy of Alex Martin, ANU.
We believed that a key to adoption of robotic harvesting technology was the simplicity with which it could be integrated into existing farm operations. For this reason we considered high speed to be a key design requirement. We therefore developed a vision system that relied on simple, robust algorithms that allowed for high speed data processing. We also developed a novel `ballistic cut-and-throw’ harvesting technique that allowed for harvesting of multiple asparagus spears per second. A demonstration of our harvesting technique is included below.
Perception System
We collaborated with a local farm to trial our perception system.
 Fig 1. On-farm data capture.
Fig 1. On-farm data capture.
We then built a camera system and mounting platform in-lab to allow for prototyping of the vision system.
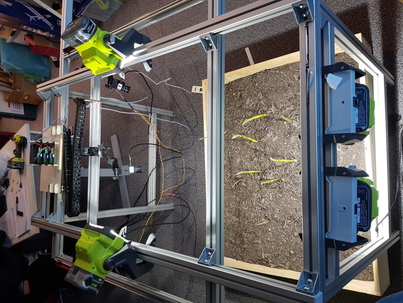 Fig 2. In-lab prototyping.
Fig 2. In-lab prototyping.
Our vision system was designed to operate at high speeds, and was therefore based on combining simple algorithms, including homography projection, line fitting, and Kalman filtering.
 Prototype Perception Pipeline.
Prototype Perception Pipeline.
Project Update
Unfortunately due to a variety of circumstances this project finished in 2019, before a complete prototype could be produced.